____________________________________________________________________________________
Le programme
ci-dessous va vous permettre de comprendre les mécanismes de programmation
en C du pilotage d'un servo-moteur de télécommande. De nombreux
sites détaillant le principe de fonctionnement des servo-moteurs, nous
n'irons pas dans le détail mais nous vous fournissons quelques liens
sur lesquels vous trouverez des descriptions trés bien réalisées
de ces équipements.
LE SERVO-MOTEUR
Pour réaliser
ce montage, j'ai utilisé un servo-moteur FUTABA FP-S148. Celui-ci comporte
3 fils, un fil rouge qui doit être raccordé au +5V, un fil noir
qui doit être raccordé à la masse. Le fil blanc est le fil
qui reçoit le signal de commande du PIC. Si vous voulez utiliser tel
quel le programme fourni, vous devrez connecter ce fil à la broche B7
du PIC. Il vous faudra
encore connecter un bouton poussoir sur l'entrée B0 du PIC et un autre
sur l'entrée B1. Ces deux poussoirs permettront au programme de test
de faire bouger le servo.
LE PROGRAMME
Le programme
a la particularité de gérer le signal de commande du servo-moteur
en tache de fond. Ce mode de fonctionnement ( par interruption ) permet d'éxécuter
tout le reste du programme sans 'perdre de temps' à piloter le servo.
La position du servo est fixée par la valeur de la variable CONSIGNE,
celle-ci peut varier de 6 à 25 pour une course compléte du servo-moteur.
Les deux poussoirs placés sur notre platine de test permettent de faire
varier la valeur de CONSIGNE ( voir mainserv.c ). Le pilotage proprement dit
du servo est géré dans la routine d'interruption interrutp.c.
J'ai essayé de commenter au maximum le source de ce programme, n'hesitez
pas à me contacter si vous avez des questions sur le fonctionnement
du programme. jp.mandon@free.fr
LIENS
Je conseille
à ceux qui veulent approfondir la théorie du fonctionnement
d'un servo-moteur de visiter le site des FRIBOTTE sur lequel ils trouveront
une description complète des principes, des schémas et des programmes.
http://fribotte.free.fr
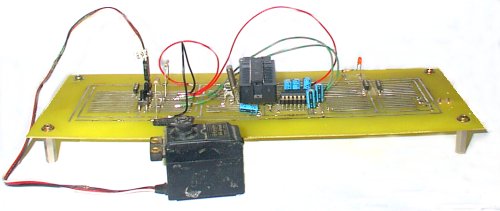
LA
REALISATION
Notre montage
a été réalisé sur une plaque test comprenant un
PIC, son quartz de 12 Mhz, son circuit de reset, un MAX232 pour attaquer le
port série du PC et deux poussoirs ( récupérés
dans un vieux magnétoscope ) pour la commande de position.
TELECHARGEMENT
Le code
CC5X pour la commande du servo-moteur:
servo.zip